8.8 KiB
Map Detection
Map detection is the core of an Azur lane bot. If simply using template matching to do the enemy detection, it will inevitably appear BOSS block by enemies. AzurLaneAutoScript (Alas), provides a better approach of map detection. In module.map, you can get full information in map, such as:
2020-03-10 22:09:03.830 | INFO | A B C D E F G H
2020-03-10 22:09:03.830 | INFO | 1 -- ++ 2E -- -- -- -- --
2020-03-10 22:09:03.830 | INFO | 2 -- ++ ++ MY -- -- 2E --
2020-03-10 22:09:03.830 | INFO | 3 == -- FL -- -- -- 2E MY
2020-03-10 22:09:03.830 | INFO | 4 -- == -- -- -- -- ++ ++
2020-03-10 22:09:03.830 | INFO | 5 -- -- -- 2E -- 2E ++ ++
module.map mainly consists of the following files:
- perspective.py Perspective detection
- grids.py Grid data parsing
- camera.py Camera moving
- fleet.py Fleet moving
- map.py Map logics for enemy searching
One Point Perspective
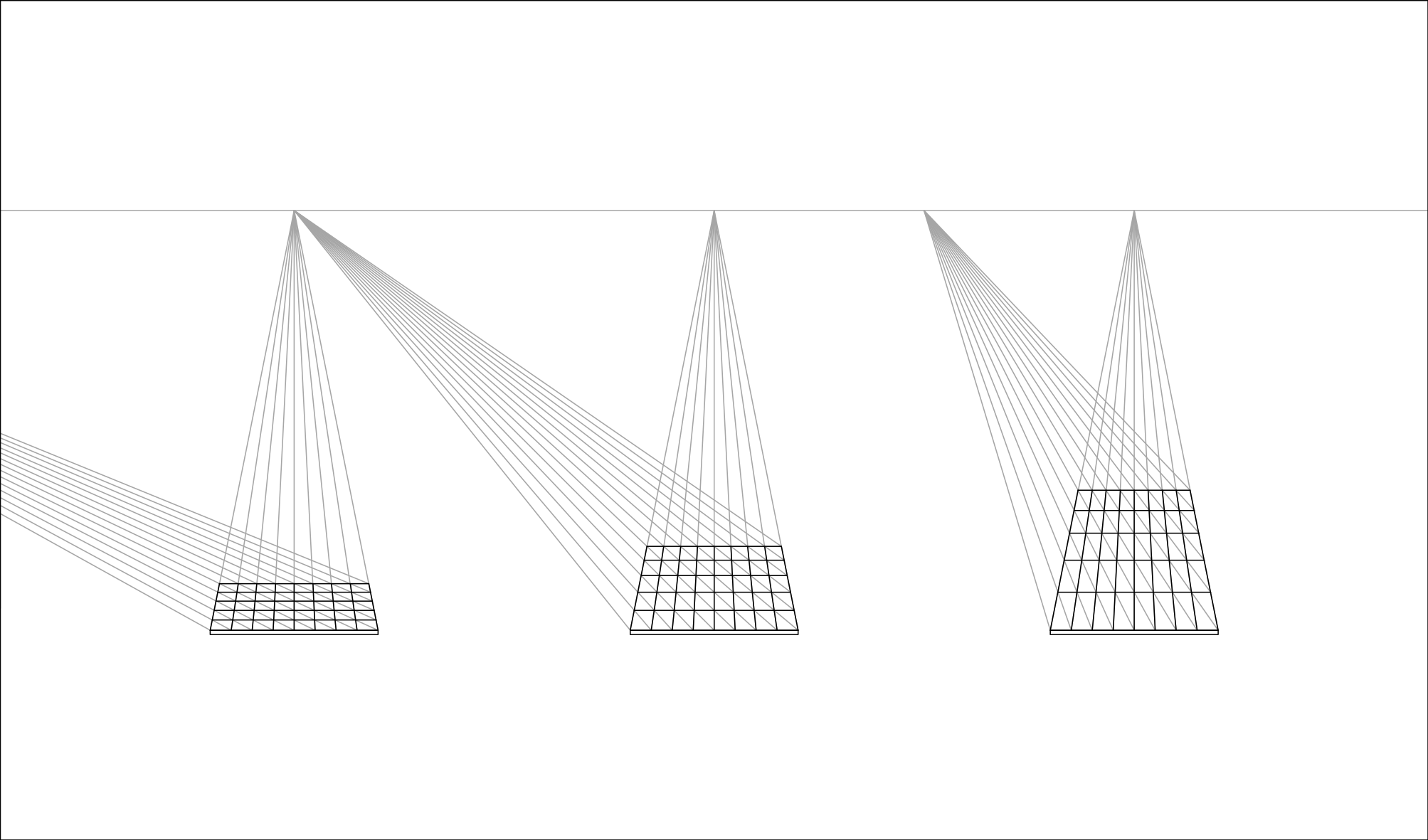
Before understanding how alas do map detection, we have to go through some basic knowledge of one point perspective. Map of Azur Lane is grid in one point perspective. Parsing perspective needs to calculate vanish point and distant point.
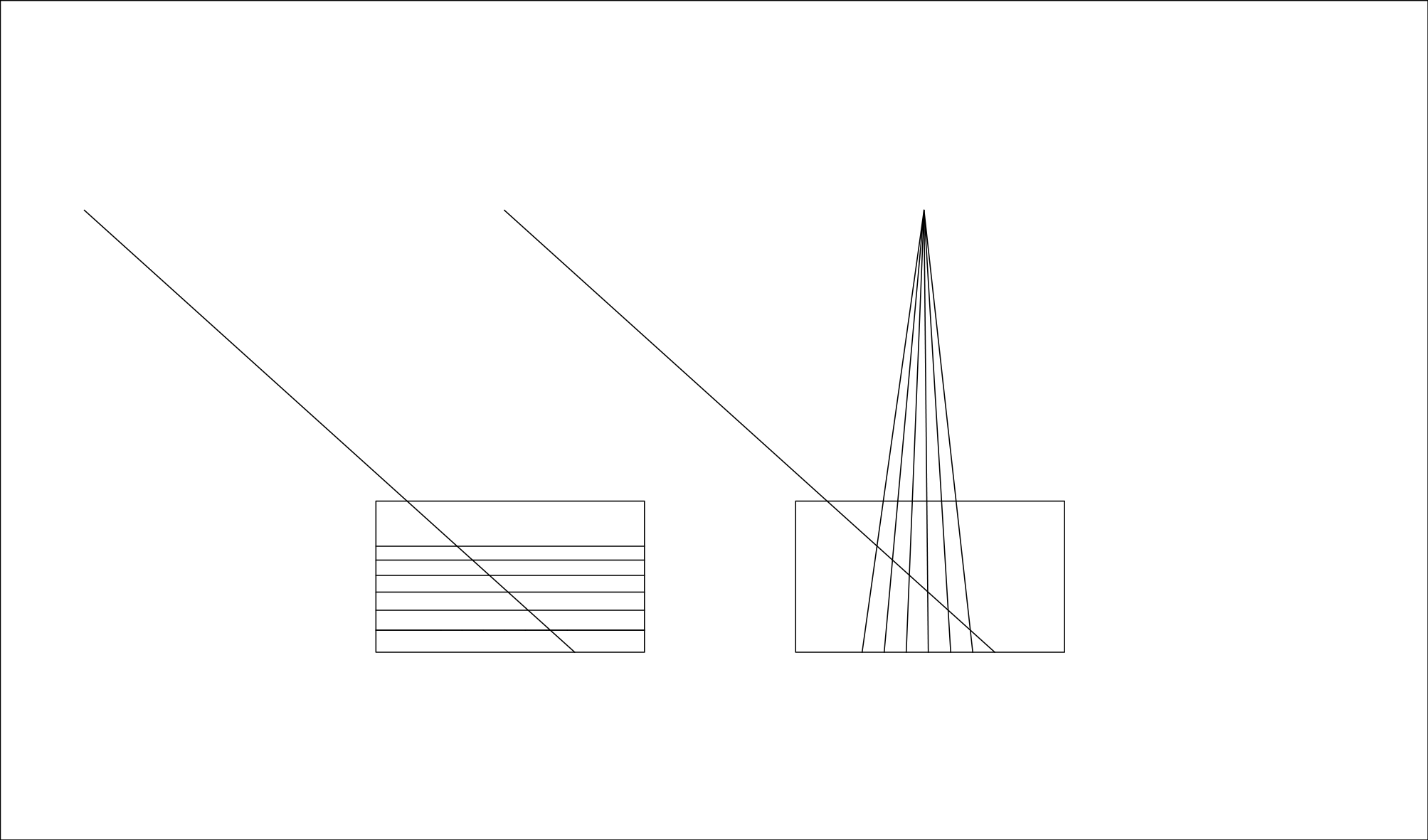
In one point perspective:
- the perspective of horizontal lines are still horizontal lines.
- the perspective of all vertical lines intersect at one point, called
vanish point. The further a vanish point away from grids, the perspective of vertical lines closer to 90 degree.
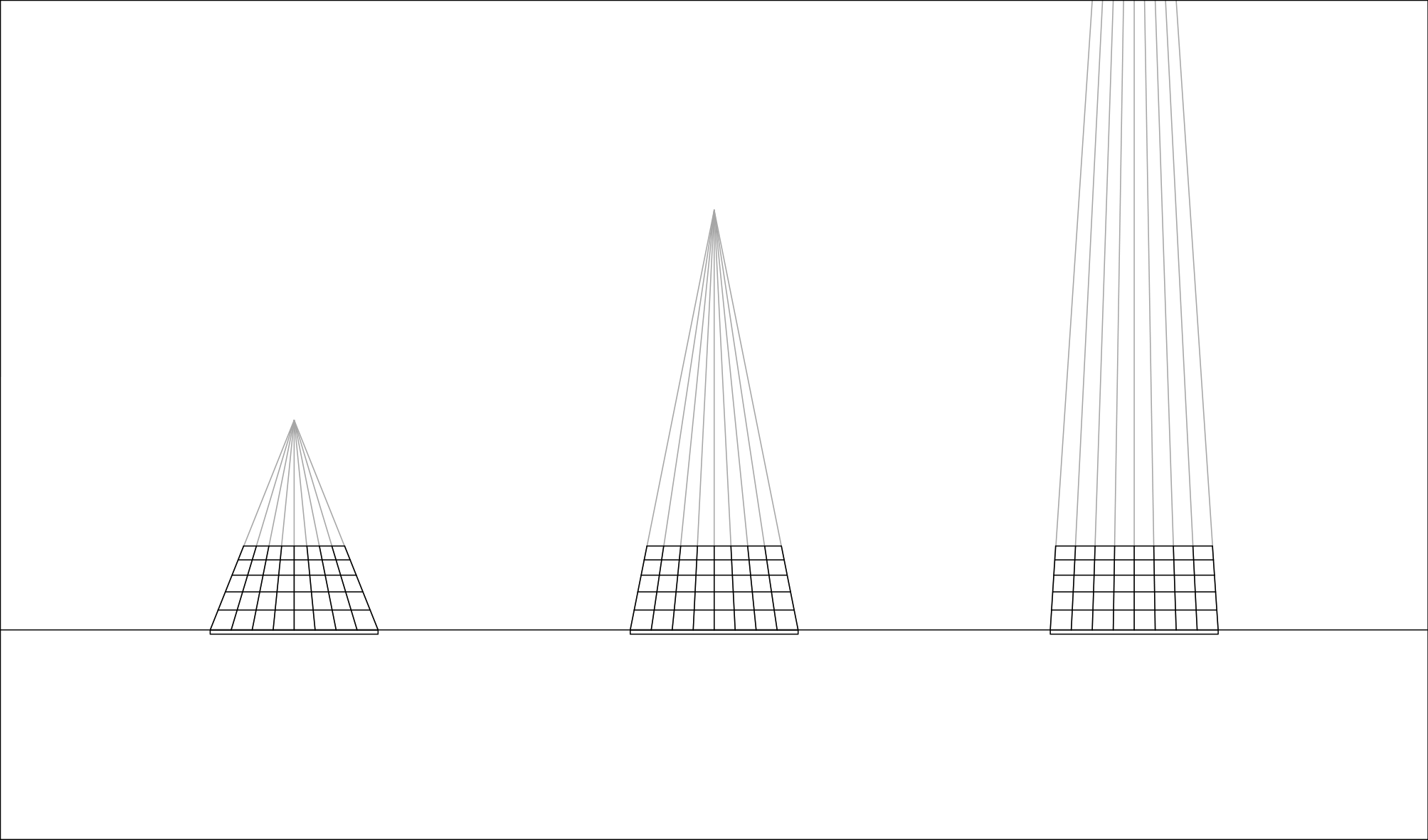
- All diagonals of the grids intersect at one point, called
distant point, The further a distant point away from grids, the grid become fatter. In fact, there are 2 distant point, the following image draws the one to the left of vanish point.
Screenshot Pre-processing

When perspective.py gets an screenshot, function load_image do such process:
- crop area of detection
- to grayscale, Using the algorithm in Photoshop, (MAX(R, G, B) + MIN(R, G, B)) // 2
- cover UI. Here use
overlay.png - Reverse color
(Image above is before reverse, because the reversed image is too terrified to show)
Grid Detection
Detecting Grid Lines
Grid lines are black lines with a transparency of 20%. In 720P, it has 3 to 4 pixel wide. During the period of "old-UI", we simply move the image 1px and divide by the origin image to detect grid lines. White frame with transparency gradient is added in "new-UI", which increase the difficulty of detection.
Function find_peaks use scipy.signal.find_peaks to find grid lines. scipy.signal.find_peaks can find peaks of given data.
Crop image at height == 370, use following parameters:
FIND_PEAKS_PARAMETERS = {
'height': (150, 255 - 40),
'width': 2,
'prominence': 10,
'distance': 35,
}
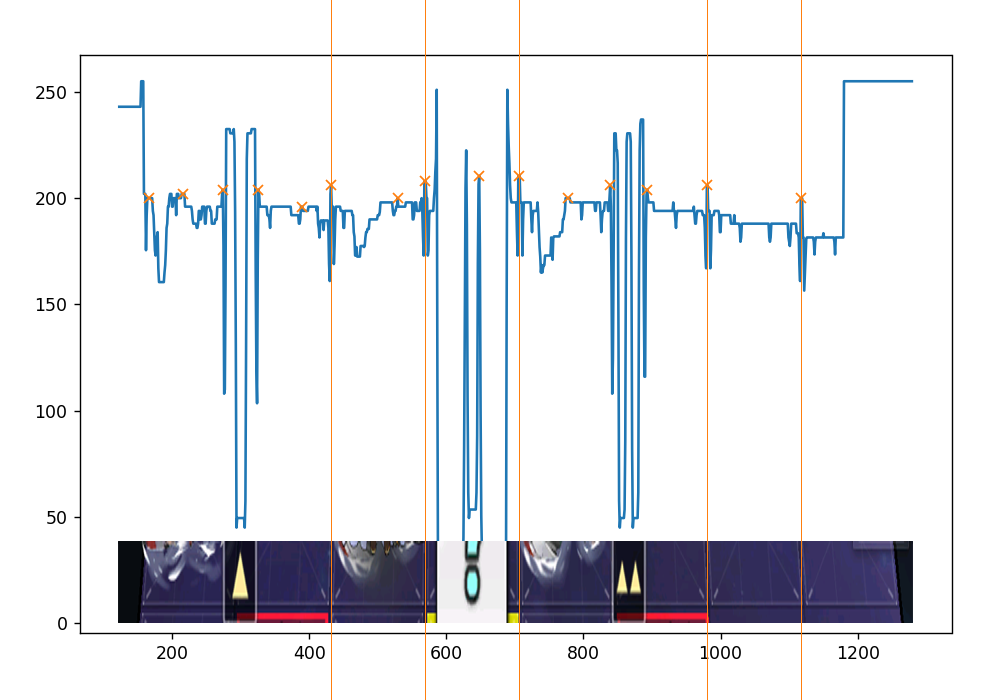
As you can see, some grid lines are not detected and has many mistake as well. Not a big deal.
Scan every row and draw the image. (For better performance, image will be flatten to 1-D array before detection, which will reduce time cost to 1/4.)
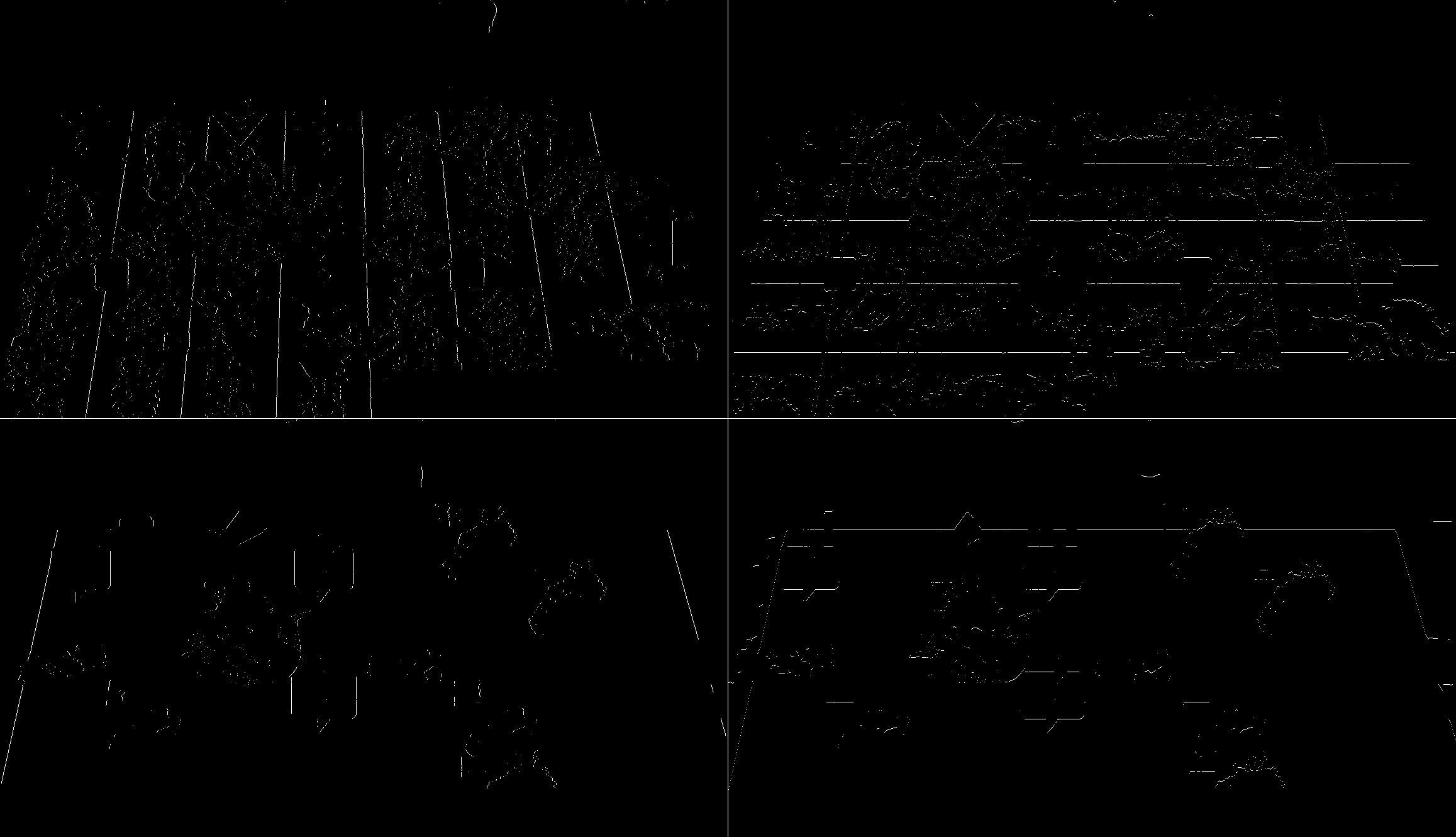
We gets 4 images so far, they are vertical inner lines, horizontal inner lines, vertical edge lines, horizontal edge lines. This process takes about 0.13 s on I7-8700k , and the full map detection process will take about 0.15 s.
P. S. Parameters use to detect inner lines are different from edge lines. In different maps, we should use different parameters. If you are lazy, you can use the default parameters, which is for 7-2. Those parameters can be used in Chapter 7, can even be used in 北境序曲(event_20200227_cn) D3.
Fitting Grid Lines
Function hough_lines use cv2.HoughLines to detect lines. Now we have 4 group of lines.

Take vertical inner lines for example. There some incorrect lines.
We create a horizontal line at the middle of image, called MID_Y, (When fixing vertical lines, create a vertical one), and cross vertical inner lines, those crossing points are called mid. If the distance between two mids smaller than 3, we treat them as a group of lines, and replace them with their average. After that, we corrected the result.
Fitting Vanish Point
As mention above, all vertical lines in one point perspective intersect at one point. There are errors in vertical lines, so we can't solve the equations to get that.
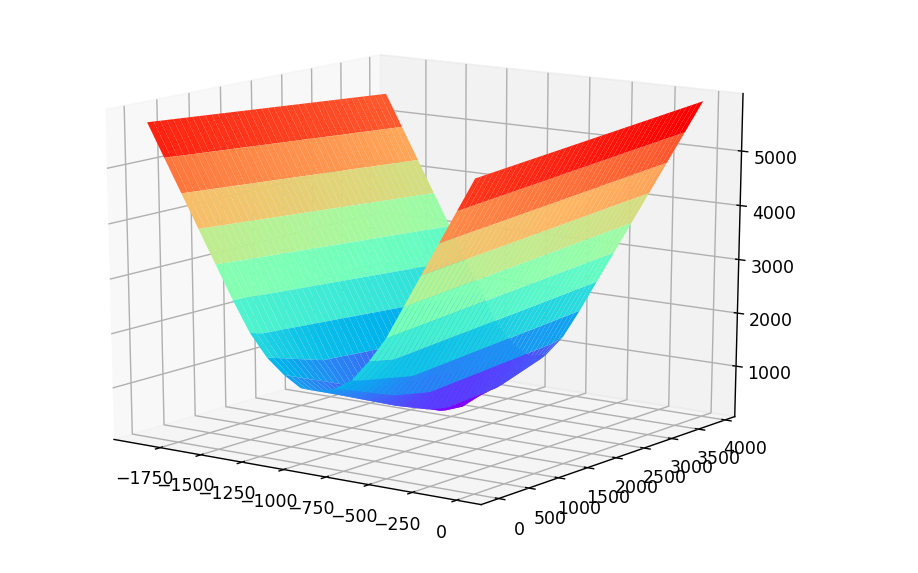
Function _vanish_point_value , use to calculate the distance between a point and a group of lines, and use scipy.optimize.brute to brute-force solve the closest point to vertical lines, which is called vanish point. This surface shows the sum of distance from the point to the group of vertical line. In order to ignore wrong lines far away from vanish point, it uses logarithm.
Still remember mid ? we re-link then to vanish point, and act as vertical lines. This is the 2nd correction.
Fitting Distant Point
We intersect the corrected vertical lines and the origin horizontal lines. distant point and canish point are on the same horizontal line, so we take a point on this horizontal line, and link all intersection, get oblique lines. Function _distant_point_value calculates the distance between the mid of oblique lines. Also use scipy.optimize.brute to brute-force solve the closet point, called distant point.
This image draws the oblique lines. Although there are many mistakes, it do gets the correct point.

Cleansing Grid Lines
With the above process, we get grid lines like this. It's generally correct, but with mistakes.

Take the mid of vertical lines.
[ 185.63733413 315.65944444 441.62998244 446.89313842 573.6301653
686.40881027 701.20376316 830.27394123 959.00511191 1087.91874026
1220.58809477]
We know all grid has a same width, so theoretically, mid is an arithmetic progression, but with wrong members and missing members. Use a linear function y = a * x + b to describe that. Because of mistakes and missing, the x in linear function may not be the number n in arithmetic progression. As long as mistakes less than 10, there will have x ∈ [n - 10, n + 10] .
Then, transform the linear function as b = -x * a + y, and x ∈ [n - 10, n + 10] . If treat a to be independent variable and treat b to be dependent variable, it's a group of lines with amount of 11 * 21. Draw them.
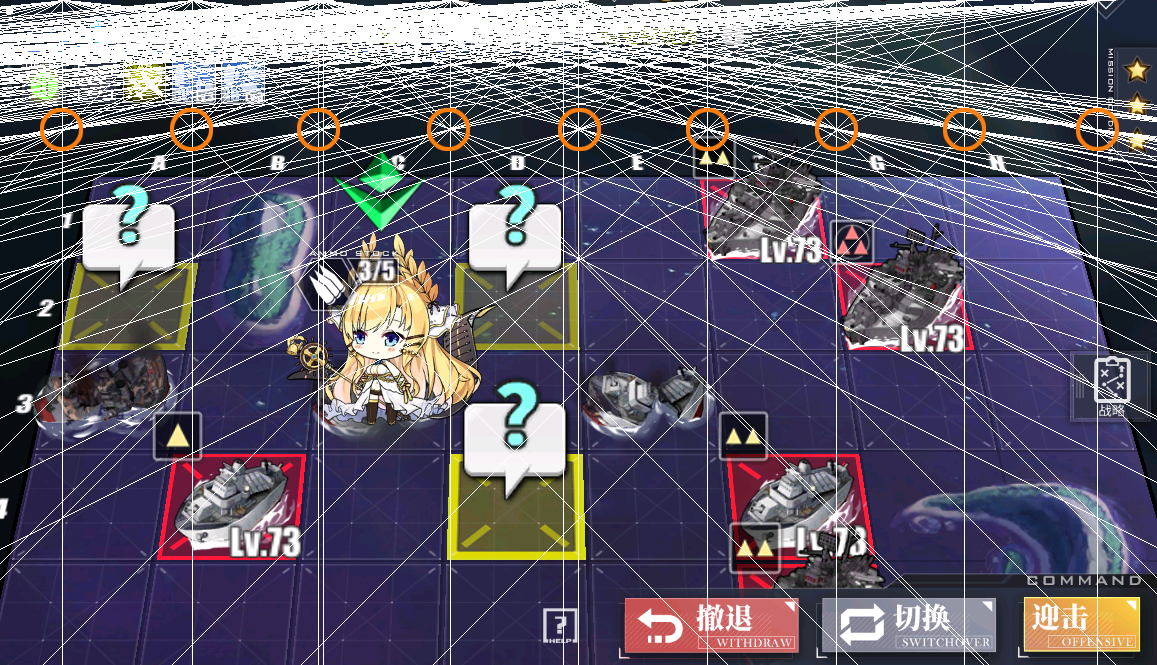
Discover that many lines intersect at where the orange circle pointed out, we call them coincident point. Those incorrect mid from incorrect lines can't intersect there, and get deleted.
Use scipy.optimize.brute to brute-force solve the coordinate of the best coincident point.
[-201.33197146 129.0958336]
So the linear function is y = 129.0958336 * x - 201.33197146 .
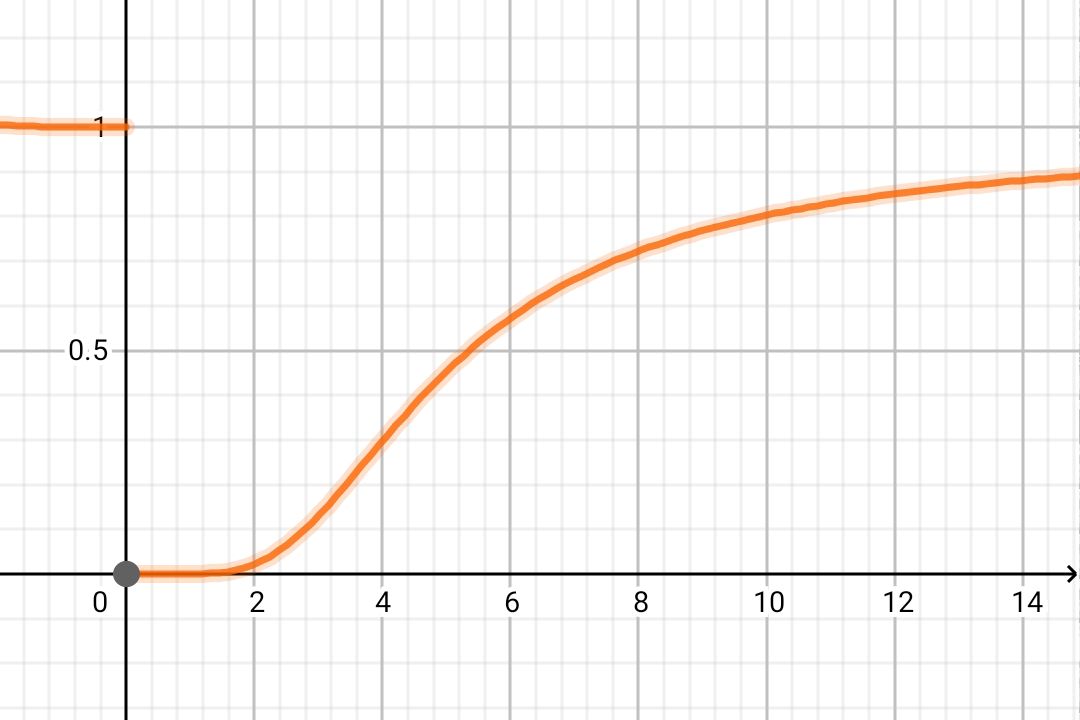
When calculating distance to the lines, it uses this function
distance = 1 / (1 + np.exp(9 / distance) / distance)This function makes it less effect by lines far away, encourage optimizer to choose the local minimum.
How to cleanse horizontal lines?
Make any line through
distant point, link intersections andvanish point. This finish a map relation from horizontal lines to vertical lines. When cleanse finished, do a reversed process.
At last, generate mid, and crop it with the edge of map and screen. Missing mid get filled now. Re-link mid to vanish point, and the cleansing of grid lines is finished.
Draw results:

Grid Cropping
In fact, shipgrils, enemies, mystery are images fixed on grid center. They are scaled because of perspective.
P. S. They are scaled only, but not perspective transform. Only red border and yellow border on the ground are perspective transformed.

In grid_predictor.py, provides function get_relative_image , which do crops according to grid center, and rescale to given shape. Now we can simply use template matching.
from PIL import Image
from module.config.config import cfg
i = Image.open(file)
grids = Grids(i, cfg)
out = Image.new('RGB', tuple((grids.shape + 1) * 105 - 5))
for loca, grid in grids.grids.items():
image = grid.get_relative_image(
(-0.415 - 0.7, -0.62 - 0.7, -0.415, -0.62), output_shape=(100, 100))
out.paste(image, tuple(np.array(loca) * 105))
out

Parsing Grid Data
To be continued.